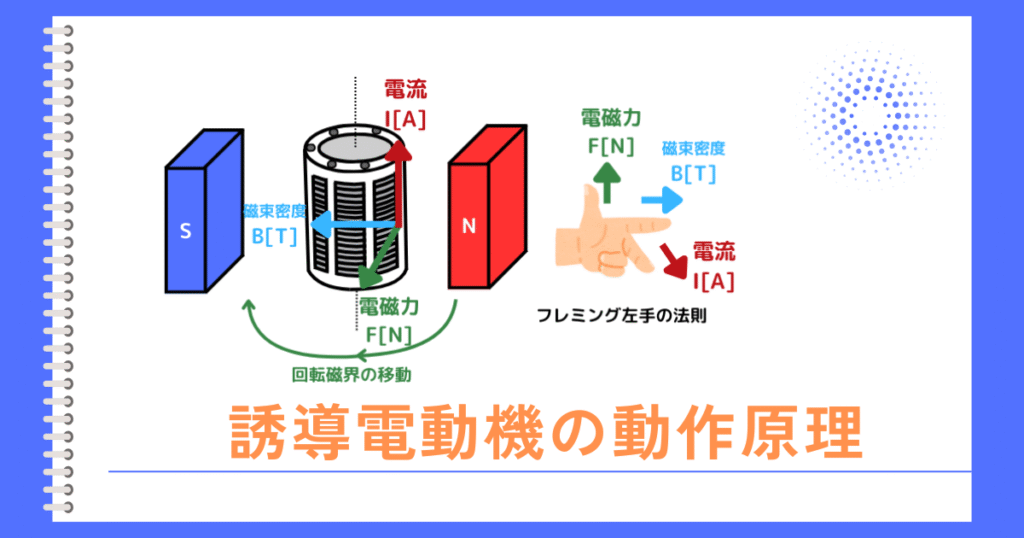
単相誘導電動機とは
単相誘導電動機は、単相交流電源に接続して動く誘導電動機です。
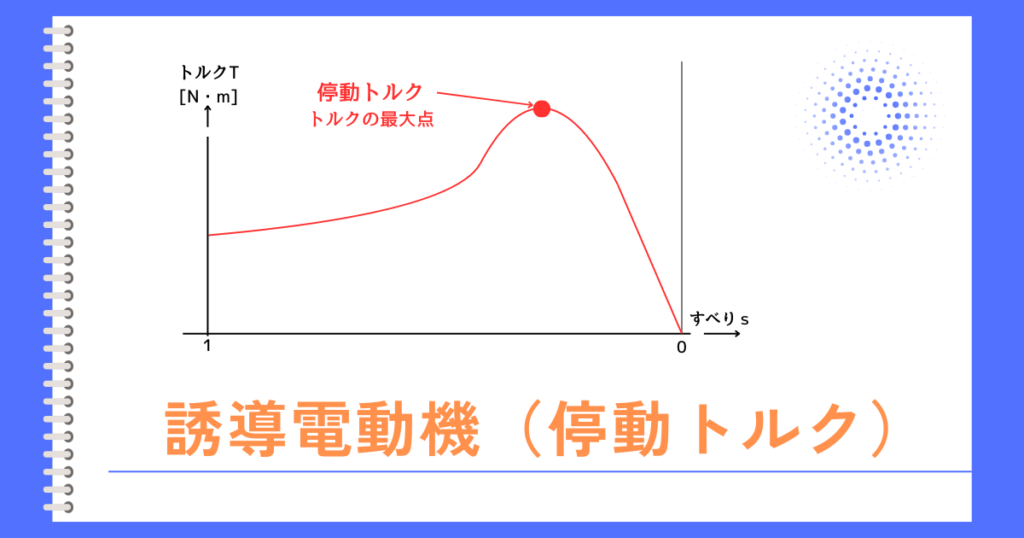
始動トルクが0という大きな特徴を持っています。
そのため、始動のための工夫が必要になります。
始動トルクが0の理由
始動トルクが0である理由は、単相交流電源で得られる磁界は、交番磁界であるためです。
交番磁界とは、時間と共にその大きさと、向きを変化させる磁界です。つまり、時間的に振動するだけで回転しない磁界です。
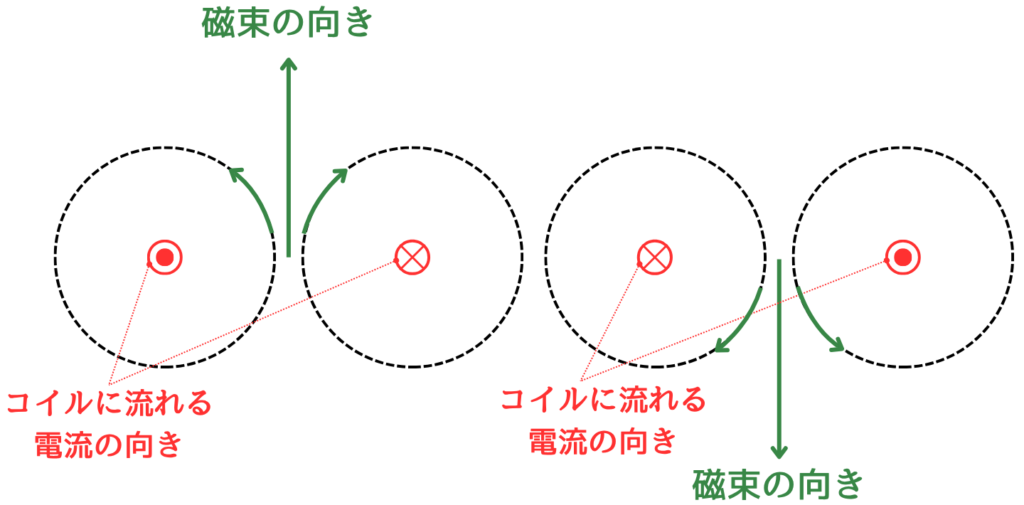
コイルに流れる交流電流は、電流の向きが周期的に変わるので、その交流電流が作り出す磁束の向きも変わります。
図の交番磁界の例では、上方向と、下方向の二方向にしか磁束は発生しません。
そのため、静止した回転子がどちらに回転するかという方向付けをすることができません。
その結果、始動トルクが0となり、静止した回転子を回転させることができません。
交番磁界の分解
交番磁界による単相誘導電動機のトルクを考えるとき、逆時計回りに回る正相回転と、時計回りに回る逆相回転に分解して考えると、トルク特性を解析しやすくなります。
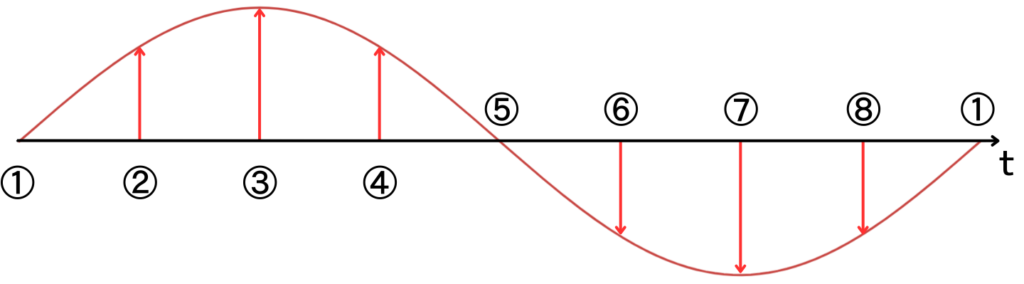
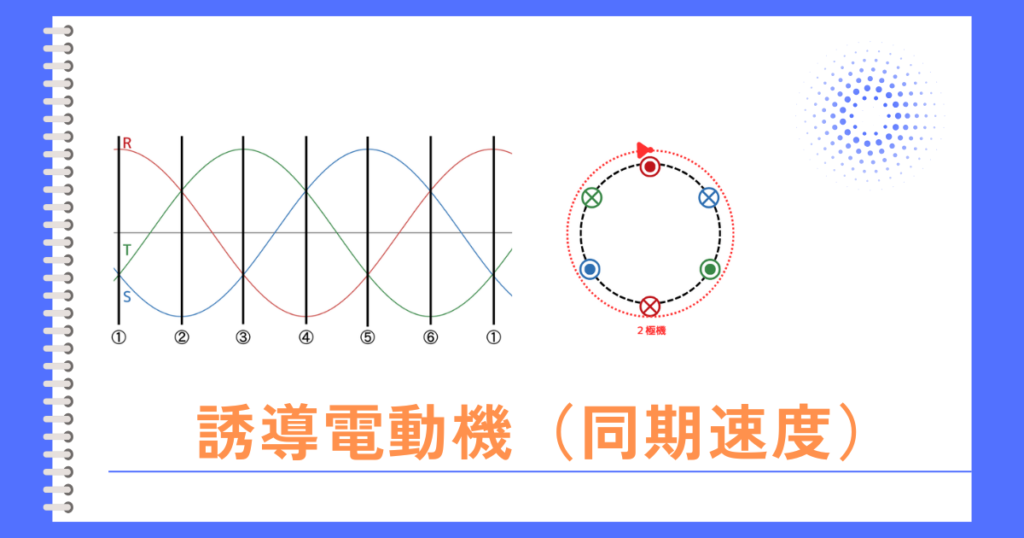
交番磁界の磁束密度の波形
交流電流のsin波に応じて、交番磁界は左図のようにsin波の変化をします。
磁束密度の波形の各タイミングに①~⑧と番号付けます。
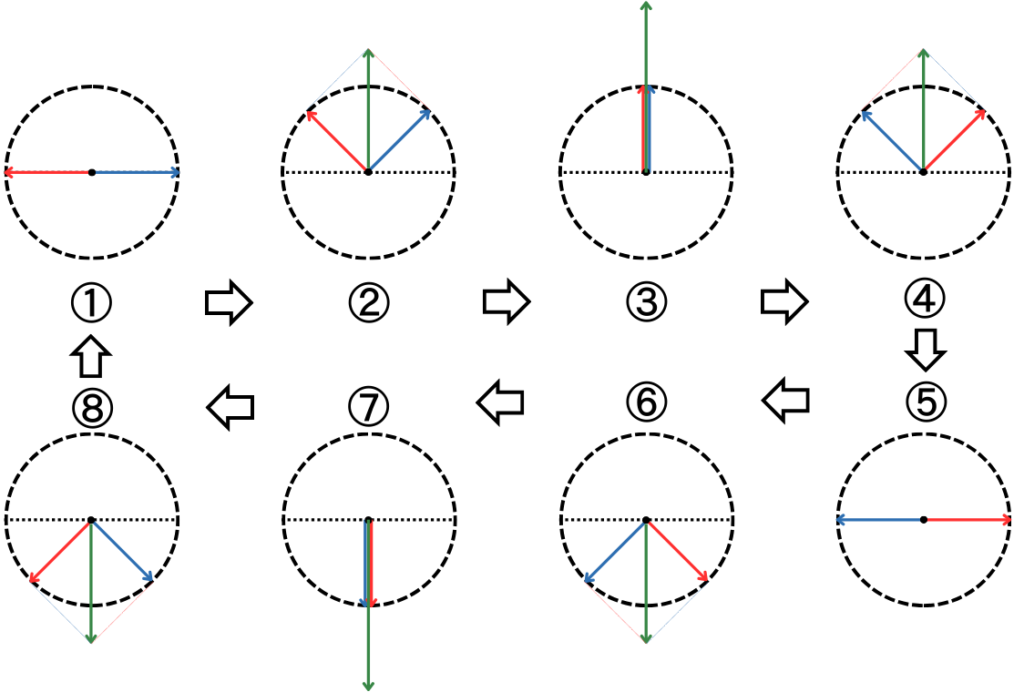
・緑色:交番磁界の磁界のベクトル
・青色:正相回転する磁界のベクトル
・赤色:逆相回転する磁界のベクトル
に分解すると、左図の様なベクトル図で表すことが出来ます。
数式的な分解
交番磁界の磁束密度\(B[T]\)を
\(B=B_m sinωt・sinθ\)
として表します。
\(cosωt\)は時間的な振動。\(cosθ\)は空間角を表します。
三角関数の加法定理から、次の様に分解できます。
\(\displaystyle B=B_m sinωt・sinθ=\frac{B_m}{2}[cos(ωt-θ)-cos(ωt+θ)]\)
・正相回転磁界:\(\frac{B_m}{2}cos(ωt-θ)\)
・逆相回転磁界:\(\frac{B_m}{2}cos(ωt+θ)\)
つまり、交番磁界は正相+逆相の2つの回転磁界の合成に等しいことが数式的に証明できました。
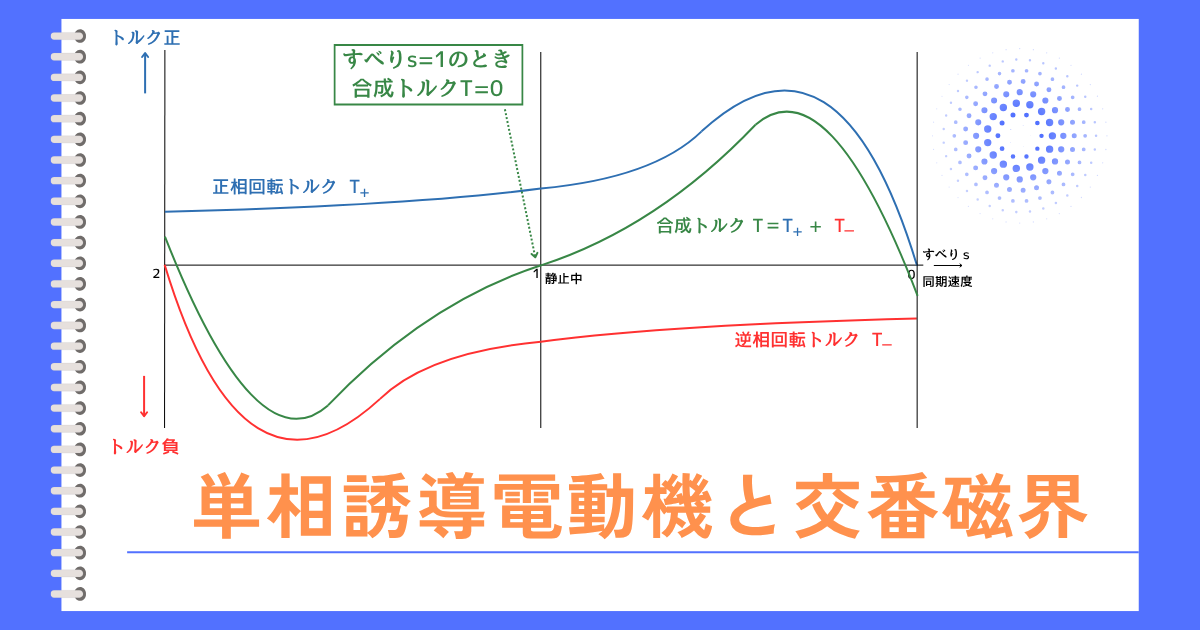
交番磁界によるトルク
逆相回転磁界が作り出す回転子のトルクを\(T_-\)とします。
このとき、
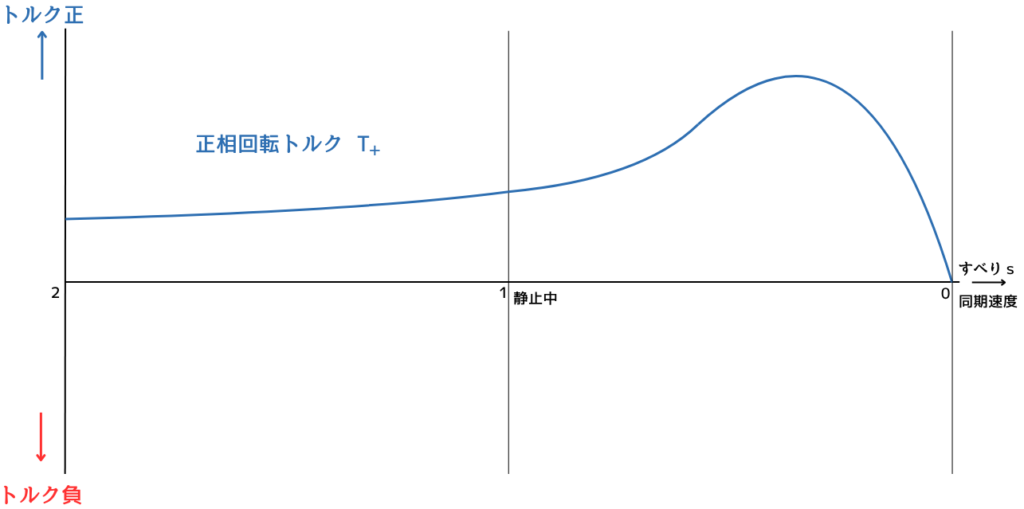
正相回転磁界が作り出す回転子のトルクを\(T_+\)とします。
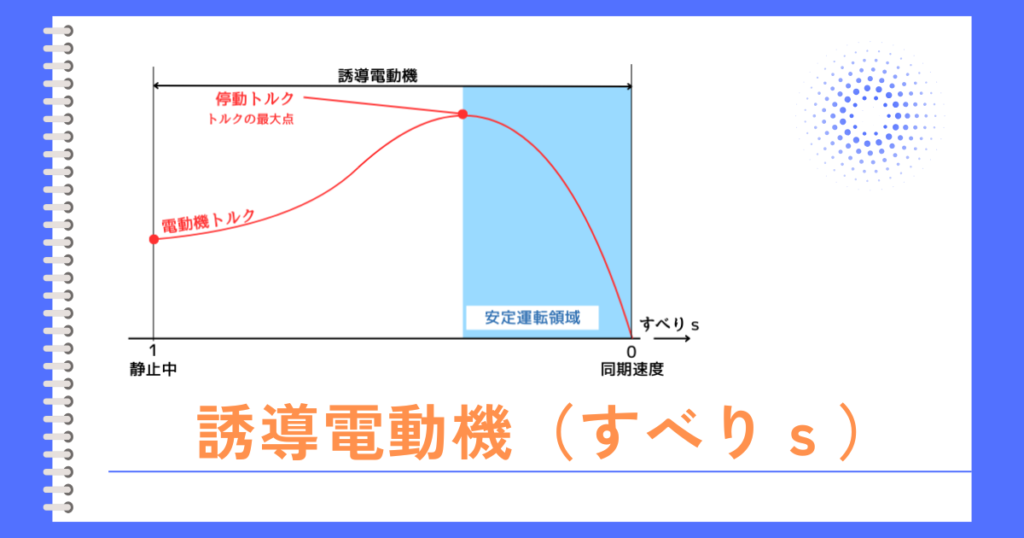
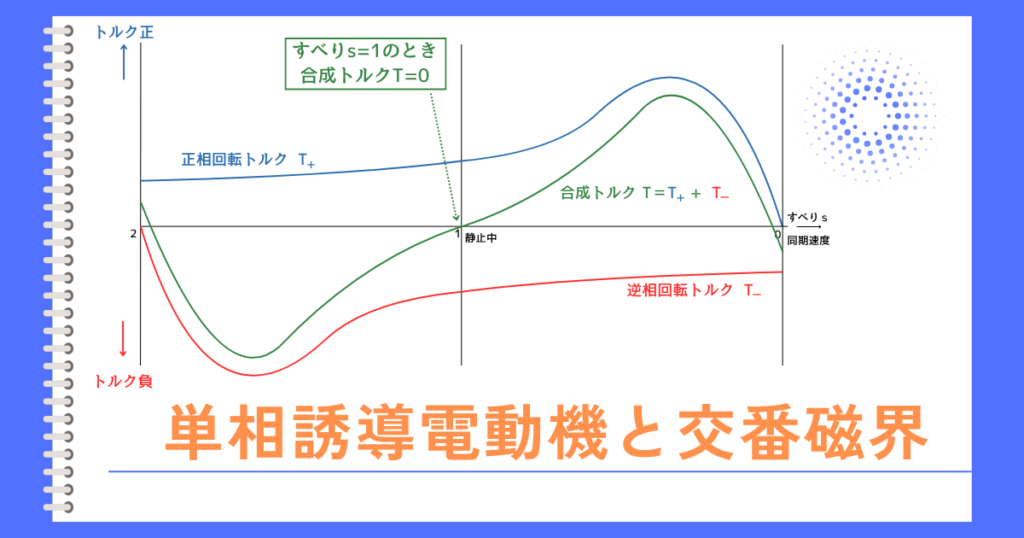
滑り\(s\)を横軸として、トルク\(T_+\)のグラフを描くと、左図の青線のようになります。
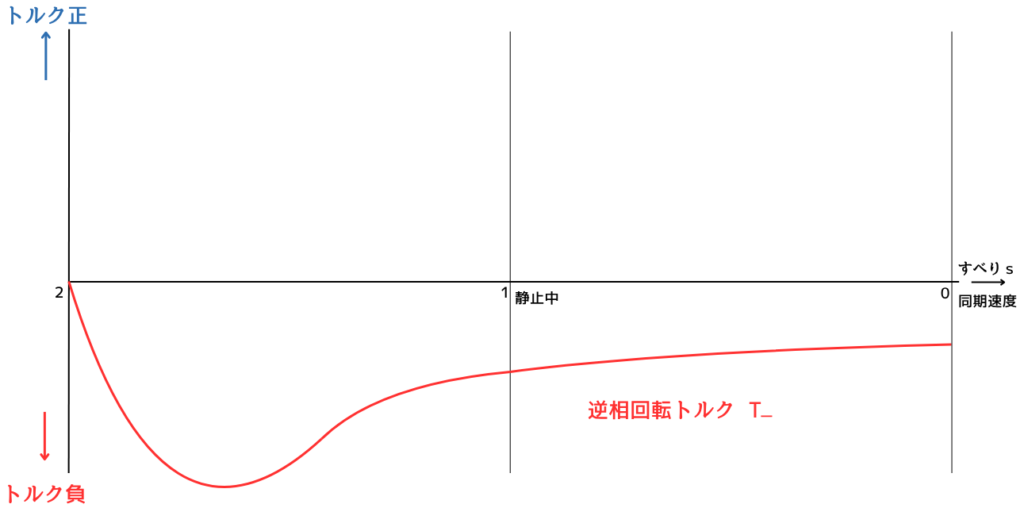
逆相回転磁界が作り出す回転子のトルクを\(T_-\)とします。
滑り\(s\)を横軸として、トルク\(T_-\)のグラフを描くと、左図の赤線のようになります。
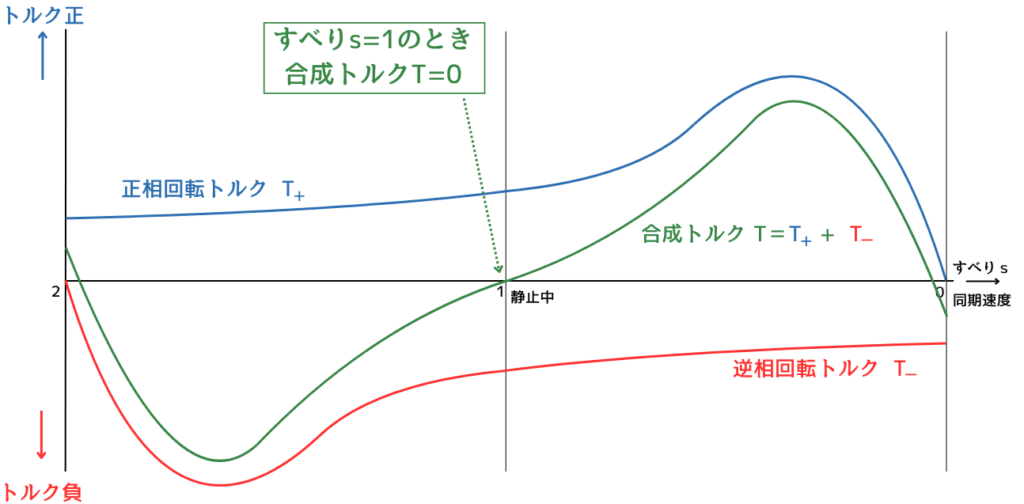
二つのトルク\(T_+\)・\(T_-\)を合成したトルク\(T\)は、緑線のようになります。
\(T=T_++T_-\)
です。この緑線の合成トルクが、交番磁界によって発生するトルクの特性です。
合成トルクの特性曲線で注目すべき点は2点あります。
①静止中(\(s=1\))のときに、合成トルクが\(T=0\)ということです。
②正相回転側に回転し始めると、正相側にトルクが生じる。
逆相回転側に回転し始めると、逆相側にトルクが生じる。
この解析結果から、単相電動機の始動について、次の事が言えます。
①から、単相誘導電動機を運転し始めるときに、正相回転トルク\(T_+\)と、逆相回転トルク\(T_-\)が釣り合ってしまって合成トルクが\(T=0\)となっているので、\(T_+\)と\(T_-\)が釣り合わないように工夫をすることで、始動トルクを得ることが出来る。
②から、正相側・逆相側のどちらに回転するかを指定できれば、欲しい回転方向の単相電動機を作ることが出来る。
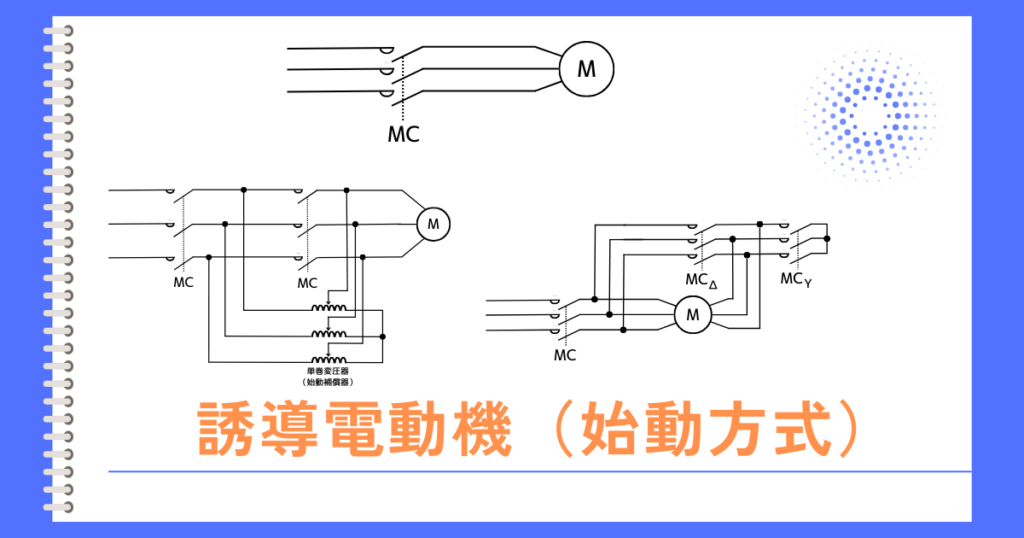
以上のことを加味して、単相誘導電動機はいくつかの始動方式があります。
・くま取りコイル形
・コンデンサ始動形
・分相始動形
各始動方式についての解説は、本頁では割愛します。
関連記事

参考書
イラストがとても多く、視覚的に理解しやすいので、初学者に、お勧めなテキストです。
問題のページよりも、解説のページ数が圧倒的に多い、初学者に向けの問題集です。
問題集は、解説の質がその価値を決めます。解説には分かりやすいイラストが多く、始めて電気に触れる人でも取り組みやすいことでしょう。

本ブログの管理人は、電験3種過去問マスタを使って電験3種を取りました。
この問題集の解説は、要点が端的にまとまっていて分かりやすいのでお勧めです。
ある程度学んで基礎がある人に向いています。

コメント