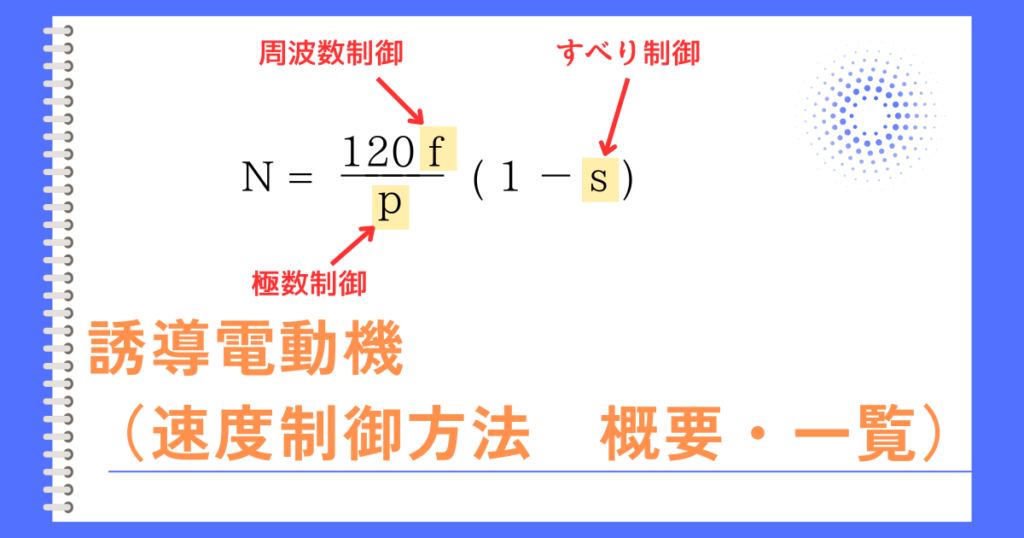
一次電圧制御とは
一次電圧制御は、誘導電動機の速度制御方法の一つです。
誘導電動機に接続した電源電圧\(V\)の大きさを増減することで、すべり\(s\)を制御することができます。すべり\(s\)を制御することによって、回転速度が制御できます。
一次電圧制御方式におけるトルクの式は、次のように表せます。
\(\displaystyle T=\frac{3sV^2}{ω_sr’_2}\)
一次電圧\(V\)を下げると、電動機のトルク\(T\)も電圧の二乗に比例して減少します。
この特性から、低速域ではトルクが不足するため、速度制御が出来る幅が限られてしまいます。
すべり\(s\)を操作することから、制御としては荒いことと、効率が悪くて電動機が熱を持ちやすいことから、実用上は小容量機の簡易速度制御に限定されます。
一次電圧制御には、次のような特徴があります。
長所
・電圧調整器だけで実現可能(簡単)
・起動電流を下げることが可能
短所
・実用的な速度制御範囲が狭い
・効率が悪い
・回転速度の精密制御はできない
一次電圧制御の特性の計算
一次電圧\(V\)と、トルク\(T\)、すべり\(s\)の関係を導出し、一次電圧制御の特性を求めていきます。
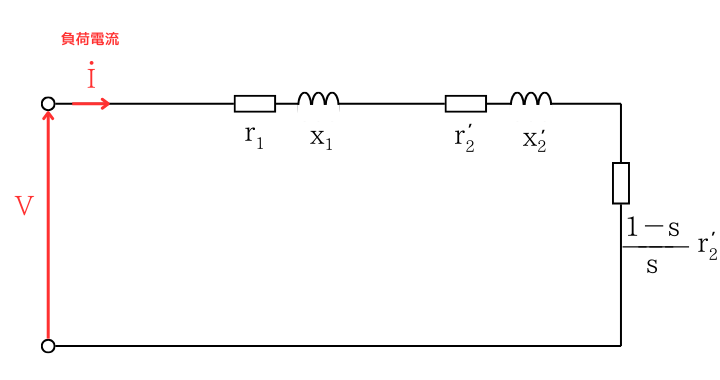
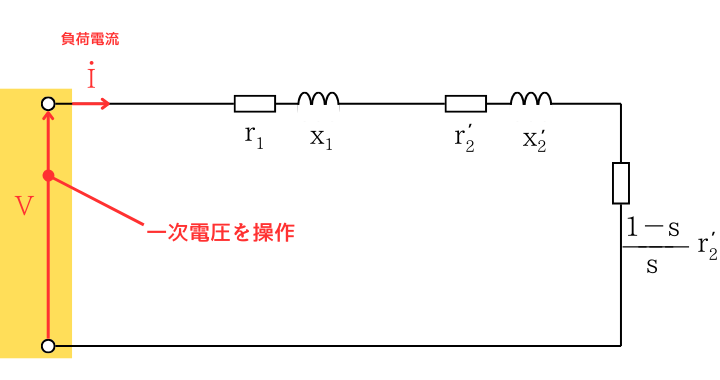
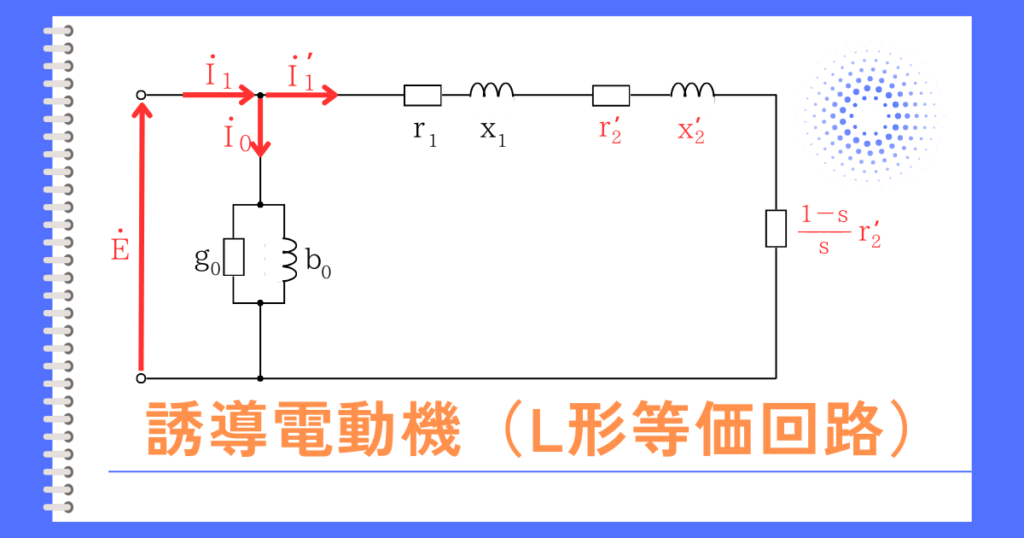
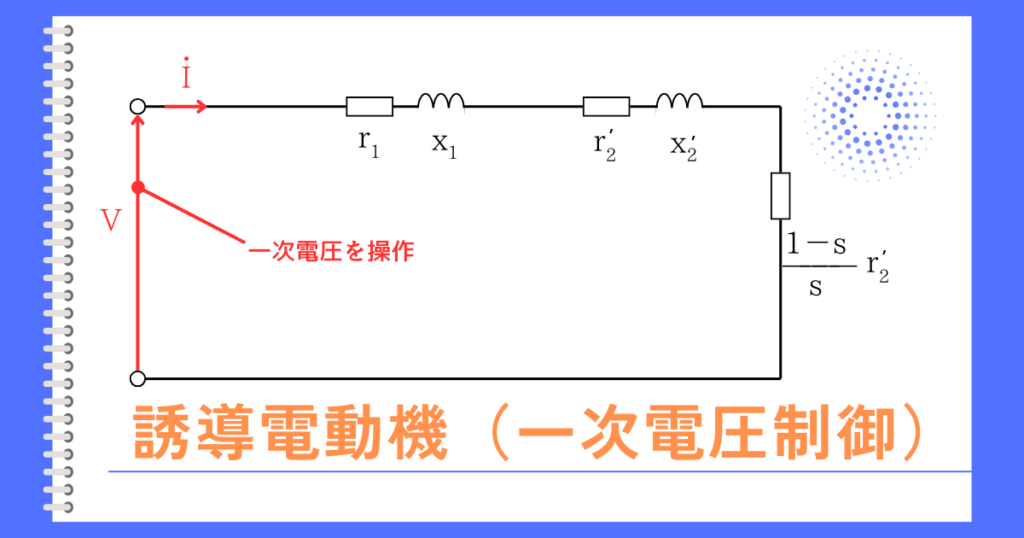
図1.誘導電動機のL形等価回路
➡
省略
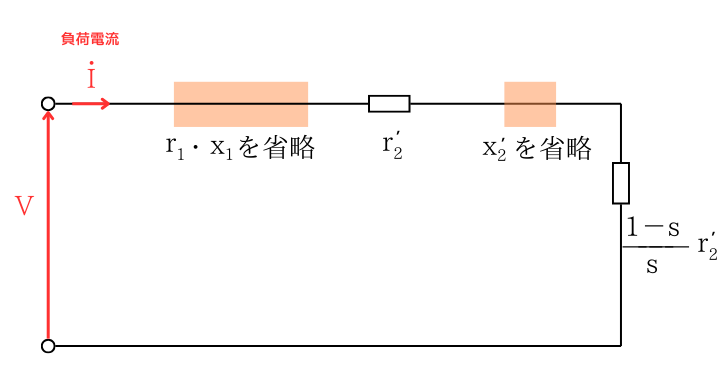
図2.定格運転時で省略した回路
図1は、誘導電動機のL形等価回路です。L形等価回路のオーム法則から、負荷電流の大きさ\(I\)は、
\(\displaystyle I=\frac{V}{\sqrt{\left( r_1+\frac{r’_2}{s} \right)^2 +(x_1+X_2)^2}}\) …①
このまま計算するのは面倒なので、定格運転時という条件で回路を省略します。
定格運転時は、
・\(r’_2 >> r_1\)
・\(r’_2 >> x_1+x’_2\)
の関係があります。このことから、①式の分母を簡略化できます。
\(\displaystyle I=\frac{V}{\frac{r’_2}{s}}=\frac{sV}{r’_2}\) …②
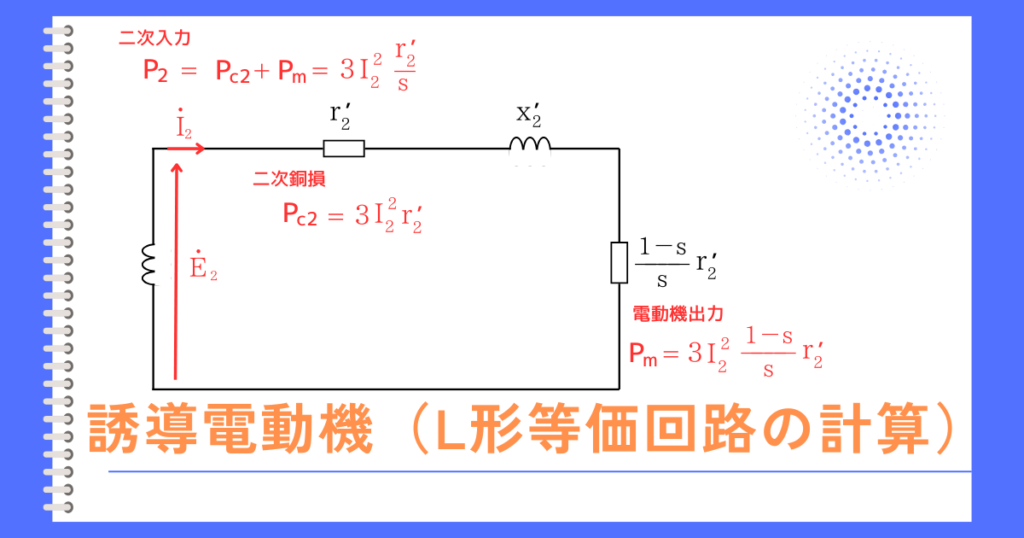
定格運転時の二次入力\(P_2[W]\)は、
\(\displaystyle P_2=3I^2_2 \frac{r’_2}{s}=\frac{3sV^2}{r’_2}\) …③
機械的出力を\(P_m[W]\)、軸の回転角速度\(ω[rad/s]\)、トルク\(T[Nm]\)の関係は、
\(P_m=Tω\)
⇔ \(\displaystyle T=\frac{P_m}{ω}=\frac{(1-s)P_2}{(1-s)ω_s}=\frac{P_2}{ω_s}\) …④
です。
④式に③式を代入すると、
\(\displaystyle T=\frac{P_2}{ω_s}=\frac{3sV^2}{ω_sr’_2}\) …⑤
となります。
実用的な速度制御範囲が狭い理由
速度制御範囲が狭い理由は、トルクの式(⑤式)からわかります。
トルク\(T\)は、すべり\(s\)と、一次電圧\(V\)の二乗に比例します。
このことから、一次電圧\(V\)を下げるとトルク\(T\)が急激に低下します。
トルク\(T\)が負荷を下回ってしまうと、電動機を回転させることが出来なくなってしまうので、一次電圧\(V\)を変化させられる範囲は狭いことがわかります。
速度制御範囲を広くする方法
速度制御範囲を広げるということは、すべり\(s\)を大きくするということです。
負荷トルク\(T\)を一定としたとき、すべり\(s\)を大きくするためには、二次抵抗\(r’_2\)を大きくしなければなりません。
しかし、\(r’_2\)を大きくすると、二次銅損\(P_{c2}\)が増加し、効率が低下する問題があります。
⑤式を変形すると、
\(\displaystyle s=\frac{Tω_sr’_2}{3V^2}\) …⑥
となり、同じトルク\(T\)を出力し続けるとした場合、すべり\(s\)が電圧\(V\)の二乗に反比例することがわかります。
すべり\(s\)が電圧\(V\)の二乗に反比例することから、負荷電流\(I\)は電圧\(V\)に反比例します。
効率が悪い理由
すべりの式(⑥式)と、負荷電流の式(②式)から一次電圧制御で電圧\(V\)を下げると、負荷電流\(I\)が増加することとなります。
負荷電流\(I\)が増加すると、一次銅損\(P_{c1}\)、二次銅損\(P_{c2}\)が増加するため効率が低下します。
したがって、一次電圧制御は効率が悪いといえます。
回転速度の精密制御はできない理由
すべりの式(⑥式)から、回転速度の精密制御はできない理由がわかります。
すべり\(s\)は、⑥式から負荷トルク\(T\)が変動すると、すべり\(s\)も変動します。
このことから、回転速度の大まかな変化をさせることはできますが、回転速度を精密に制御することはできません。
関連記事

参考書
イラストがとても多く、視覚的に理解しやすいので、初学者に、お勧めなテキストです。
問題のページよりも、解説のページ数が圧倒的に多い、初学者に向けの問題集です。
問題集は、解説の質がその価値を決めます。解説には分かりやすいイラストが多く、始めて電気に触れる人でも取り組みやすいことでしょう。

本ブログの管理人は、電験3種過去問マスタを使って電験3種を取りました。
この問題集の解説は、要点が端的にまとまっていて分かりやすいのでお勧めです。
ある程度学んで基礎がある人に向いています。

コメント