
概要
令和26年問4から数値を少し変更した程度の類題です。
誘導電動機の速度制御法の一つに一次周波数制御法があります。
一次周波数制御法の一つとして\(\frac{V}{f}\)制御があります。
本問は、\(\frac{V}{f}\)制御に関する計算問題です。
\(\frac{V}{f}\)制御法にはVVVFインバータが使われます。
キーワード
誘導電動機、\(\frac{V}{f}\)制御、一次周波数制御法
問題
出力が大きい定格運転条件では、誘導機の等価回路の電流は、「二次電流≫励磁電流」であるから、励磁回路を省略しても特性をほぼ表現できる。
さらに、「二次抵抗による電圧降下≫その他の電圧降下」となるので、一次抵抗と漏れリアクタン
スを省略しても、おおよその特性を検討できる。
このような電動機でトルク一定負荷の場合に、電流\(80 A\) の定格運転から電源電圧と周波数を共に\(5\)%下げて回転速度を少し下げた。
このときの電動機の電流の値\([A]\)として、最も近いものを次の(1)~(5)のうちから一つ選べ。
(1) 72 (2) 76 (3) 80 (4) 84 (5) 88
答え
(3)
解説テキスト リンク

回答解説
回答の流れ
(1) L形等価回路を描き、問題文の条件を当てはめる
(2) 二次電流の大きさ\(I_2\)を求める
(3) 二次入力\(P_2\)を求める
(4) 同期角速度\(ω_s\)を求める
(5) トルク\(T\)の式を求める
(6) トルク\(T\)の式に、変化させる前後の電源電圧・周波数を代入して電流を求める
(1) L形等価回路を描き、問題文の条件を当てはめる
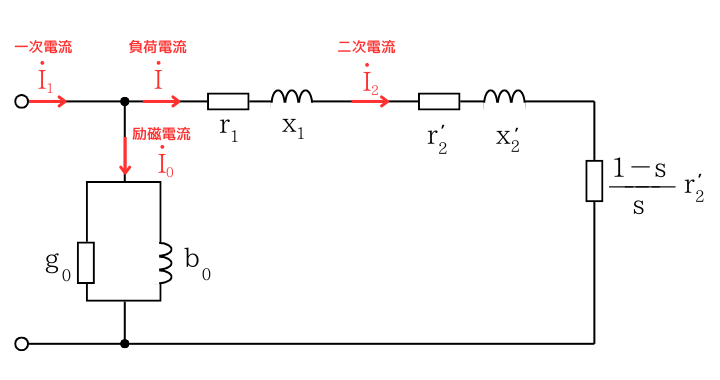
図1
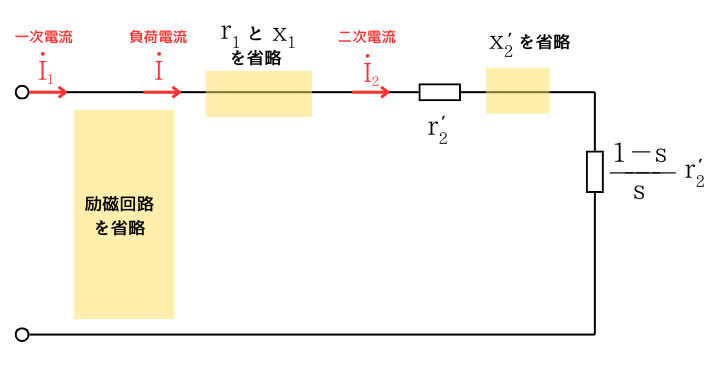
図2
図1は、問題文の条件によって回路を簡略化する前のL形等価回路です。
問題文の2つの条件をあてはめると、図2のように簡略化できます。
・「二次電流≫励磁電流」であるから、励磁回路を省略しても特性をほぼ表現できる。
・「二次抵抗による電圧降下≫その他の電圧降下」となるので、一次抵抗と漏れリアクタン
スを省略しても、おおよその特性を検討できる。
(2) 二次電流の大きさ\(I’_2\)を求める
回路図にオームの法則を使って二次電流\(I_2\)を求めます。
線間電圧を\(V[V]\)としたとき、相電圧は\(\frac{V}{\sqrt{3}}\)ですので、
\(\displaystyle I_2=\frac{\frac{V}{\sqrt{3}}}{r’_2+\frac{1-s}{s}r’_2}=\frac{\frac{V}{\sqrt{3}}}{\frac{r’_2}{s}}=\frac{sV}{\sqrt{3}r’_2}\) …①
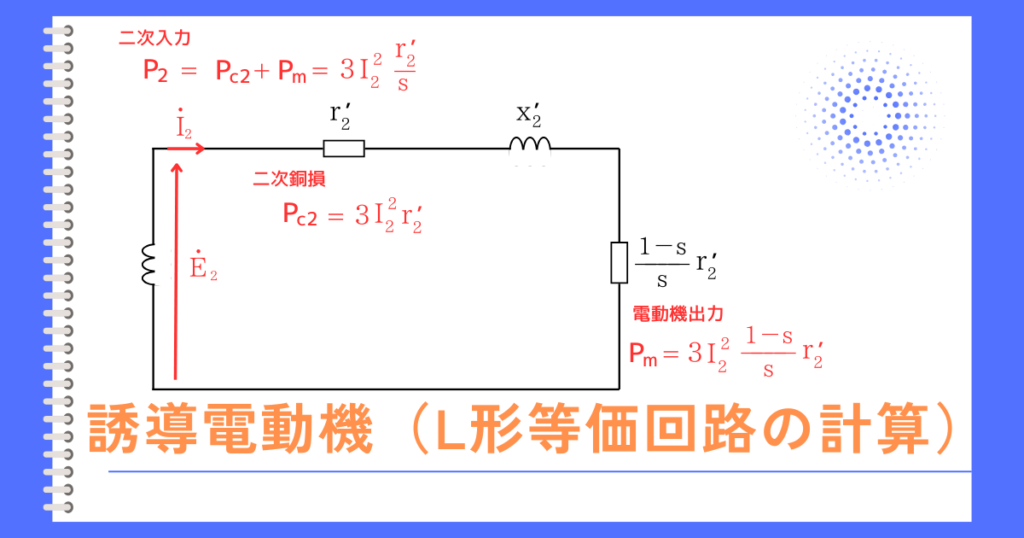
(3) 二次入力\(P_2\)を求める
二次入力\(P_2\)は、
\(\displaystyle P_2=3I^2_2 \frac{r’_2}{s}=3 \left(\frac{sV}{\sqrt{3}r’_2} \right)^2 \frac{r’_2}{s}=\frac{s}{r’_2}V^2\) …②
(4) 同期角速度\(ω_s\)を求める
同期速度\(N_s[min^{-1}]\)は、
\(\displaystyle N_s=\frac{120f}{p}\) …③
同期角速度\(ω_s[rad/s]\)は、③式から、次のように求まります。
\(\displaystyle ω_s=2π\frac{N_s}{60}=\frac{4πf}{p}\) …④
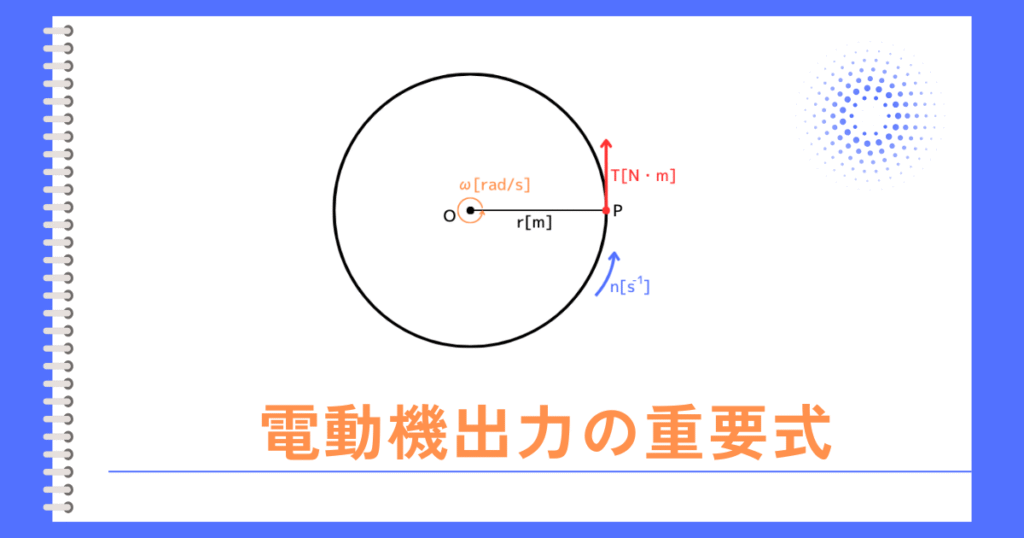
(5) トルク\(T\)の式を求める
機械的出力を\(P_m[W]\)、軸の回転角速度\(ω[rad/s]\)、トルク\(T[Nm]\)の関係は、
\(P_m=Tω\)
⇔ \(\displaystyle T=\frac{P_m}{ω}=\frac{(1-s)P_2}{(1-s)ω_s}=\frac{P_2}{ω_s}\) …⑤
⑤式に②・④式を代入します。
\(\displaystyle T=\frac{P_2}{ω_s}=\frac{\frac{s}{r’_2}V^2}{\frac{4πf}{p}}\)
⇔ \(\displaystyle T=\frac{psV^2}{4πfr’_2}\) …⑥
⑥式のままでは、電源電圧\(E[V]\)と周波数\(f[Hz]\)が変化したときの二次電流\(I_2[A]\)がわからないので、少し変形します。
\(\displaystyle T=\frac{\sqrt{3}pV}{4πf}・\frac{sV}{\sqrt{3}r’_2}=\frac{\sqrt{3}pV}{4πf}I_2\) …⑦
(6) トルク\(T\)の式に、変化させる前後の電源電圧・周波数を代入して電流を求める
電源電圧\(V[V]\)と周波数\(f[Hz]\)を共に5%下げたときの二次電流を\(I’_2[A]\)として、⑦式に代入します。
\(T=\frac{\sqrt{3}p(0.95V)}{4π(0.95f)}I’_2=\frac{\sqrt{3}pV}{4πf}I’_2\) …⑧
トルク\(T[Nm]\)が一定であるという条件なので、⑦式=⑧式です。
\(\frac{\sqrt{3}pV}{4πf}I_2=\frac{\sqrt{3}pV}{4πf}I’_2\)
⇔\(I_2=I’_2\)
以上より、電源電圧・周波数を変化させた後の二次電流\(I’_2[A]\)は、変化させる前と同じなので、
\(I’_2=80[A]\)です。
したがって、(3)\(80\)が答えです。
補足1
二次入力\(P_2[W]\)と、機械的出力を\(P_m[W]\)の関係は、
\(P_2:P_{c2}:P_m=1:s:(1-s)\)の関係から、
\(P_2=(1-s)P_m\)
です。
補足2
回転角速度\(ω[rad/s]\)と、同期角速度\(ω_s[rad/s]\)の関係を求めます。
回転速度\(N[min^{-1}]\)を、すべり\(s\)と同期速度\(N_s[min^{-1}]\)を使って表すと、
\(N=(1-s)N_s\)
です。
回転角速度\(ω[rad/s]\)は、\(ω=2π\frac{N}{60}\)
同期角速度\(ω_s[rad/s]\)は、\(ω_s=2π\frac{N_s}{60}\)
なので、
\(ω=(1-s)ω_s\)
と、置き換えることが出来ます。
出典元
一般財団法人電気技術者試験センター (https://www.shiken.or.jp/index.html)
令和7年度上期 第三種電気主任技術者試験 機械科目問題問4
参考書
イラストがとても多く、視覚的に理解しやすいので、初学者に、お勧めなテキストです。
問題のページよりも、解説のページ数が圧倒的に多い、初学者に向けの問題集です。
問題集は、解説の質がその価値を決めます。解説には分かりやすいイラストが多く、始めて電気に触れる人でも取り組みやすいことでしょう。

本ブログの管理人は、電験3種過去問マスタを使って電験3種を取りました。
この問題集の解説は、要点が端的にまとまっていて分かりやすいのでお勧めです。
ある程度学んで基礎がある人に向いています。

電験三種の領域をずっと超えた先の話を9割方しているので、電験三種の勉強の参考書としての購入はおすすめしません。
直流電動機について、ありとあらゆる事を書き記していった一冊です。
この本より詳しい本は少ないと思いますので、直流電動機の設計を学ぶ人に取っては良い本かと思われます。
感覚的には、研究論文化する内容ではないけど、後世には残しておきたいと思ったことをまとめたというような感じでしょうか。
文章の癖は強いので、もし買う場合はサンプルを読んでから購入することを推奨します。

コメント