すべり・同期速度・回転速度の重要式
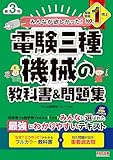
誘導電動機では、回転磁界の回転速度(同期速度)と、回転子の回転速度には必ず差が生じます。この速度差を、同期速度に対する比率で表したものをすべり\(s\)と呼びます。
すべり\(s\)、同期速度\(N_s[min^{-1}]\)、回転速度\(N[min^{-1}]\)の関係を次の式で表すことが出来ます。
誘導電動機の計算をするときに、必ず使う重要式です。
すべりの式
\(\displaystyle s=\frac{N_s-N}{N_s}\)
⇔
式変形
回転速度の式
\(N=N_s(1-s)\)
すべりと動作
すべりの値の範囲は、理論上はどの値を取ることもできますが、実用上は\(s=-1~2\)の範囲です。
すべりの値によって、誘導機の動作が大きく異なります。
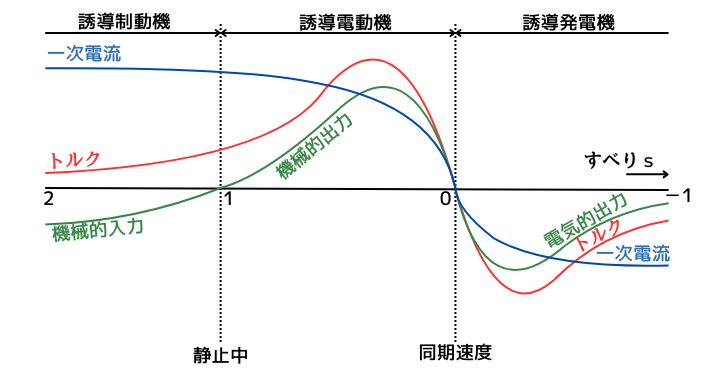
- \(s<0\):誘導発電機
- \(0≦s≦1\):誘導電動機
- \(1<s\):誘導制動機
3つに分けて説明していきます。
誘導発電機(s<0)
誘導機の回転子の軸にエンジンやタービン等を接続することで、外部から機械的入力を加えて同期速度よりも早い速度で回転させると、すべりは負となります(\(s<0\))。
このときの回転子の誘導起電力は、電動機として動くときと逆方向になります。
固定子巻線の起磁力を打ち消し、電源側へ電力が供給されるようになるため、誘導機は発電機として動作します。

誘導発電機は、減速する方向にトルクを発生させます。
機械的入力と、誘導発電機の減速トルクが釣り合う点で動作が安定します。
減速トルクには最大トルクとなる点があります。その点を超える速度になると、減速トルクが弱まるため、逸走して過速度となってしまいます。
誘導発電機は、電気自動車等で回生ブレーキとして使用されます。
電源と誘導電動機の間にインバータを接続し、インバータから電動機に与える周波数を低下させることによって、同期速度を遅くすることが出来ます。
同期速度が、誘導機の回転速度よりも遅くなれば、すべりが負の値\(s<0\)になるので、発電機として働くことができます。
誘導電動機(0≦s≦1)
電動機(モーター)は、電源から電気的入力をして、回転子の軸を回すことによって軸の回転による機械的出力を得ます。
誘導電動機のすべりは、\(0≦s≦1\)の範囲で変化します。
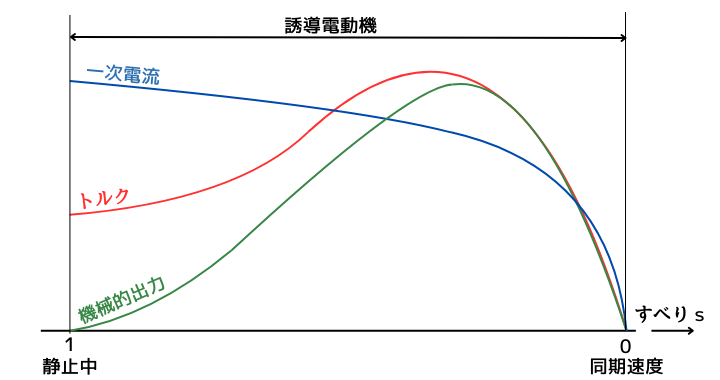
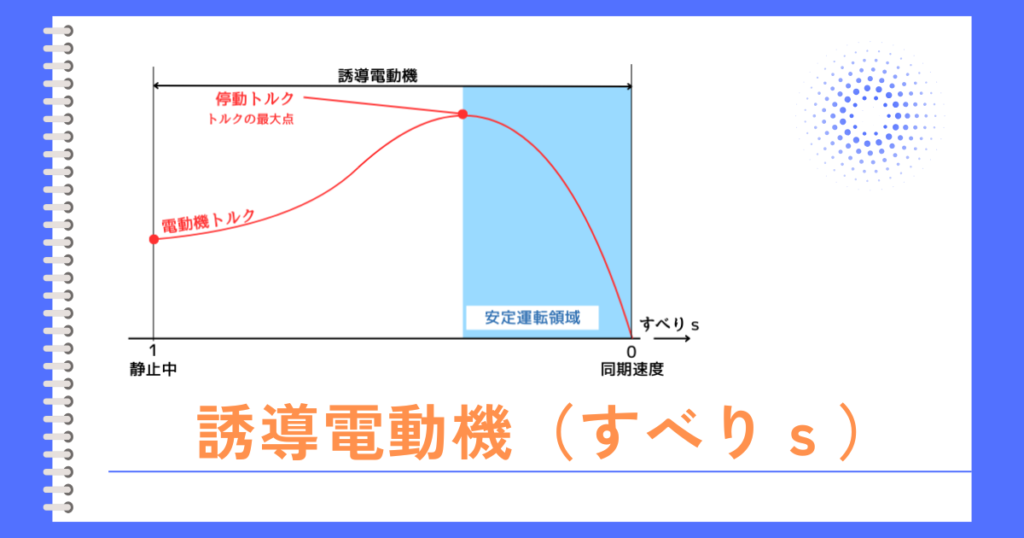
すべりに対する一次電流、トルク、機械的出力の各特性は、左図のように変化します。
キーとなるポイントは次の3点です。
・静止時(\(s=1\))
・運転中(\(0<s<1\))
・同期速度(\(s=0\))
3つに分けて説明していきます。
静止時(\(s=1\))
静止時(\(s=1\))は、回転子が回転していません。(\(N=0\))

このとき、電源から誘導機に送り出す一次電流は大きいですが、電動機トルクは小さいです。
その理由について考察していきます。
始動直後の回転子の回路には、電源周波数と同じ高い周波数の電圧が誘導されます。
そのことにより、回転子巻線の誘導性リアクタンスが非常に大きくなります。
誘導性リアクタンスが大きいことから、回転子には電流が流れづらくなります。
回転子に流れた電流によって電磁力が発生することから、電磁力が発生しづらくなり、トルクが小さくなります。
その結果、始動直後のトルクは小さくなります。
また、誘導性リアクタンスが大きいことによって、誘導電動機には大きな無効電流が流れます。
その結果、電源から誘導電動機に送り込む電流(一次電流)は大きいものの、トルクには寄与しない電流であるため、トルクが小さいということが起こります。
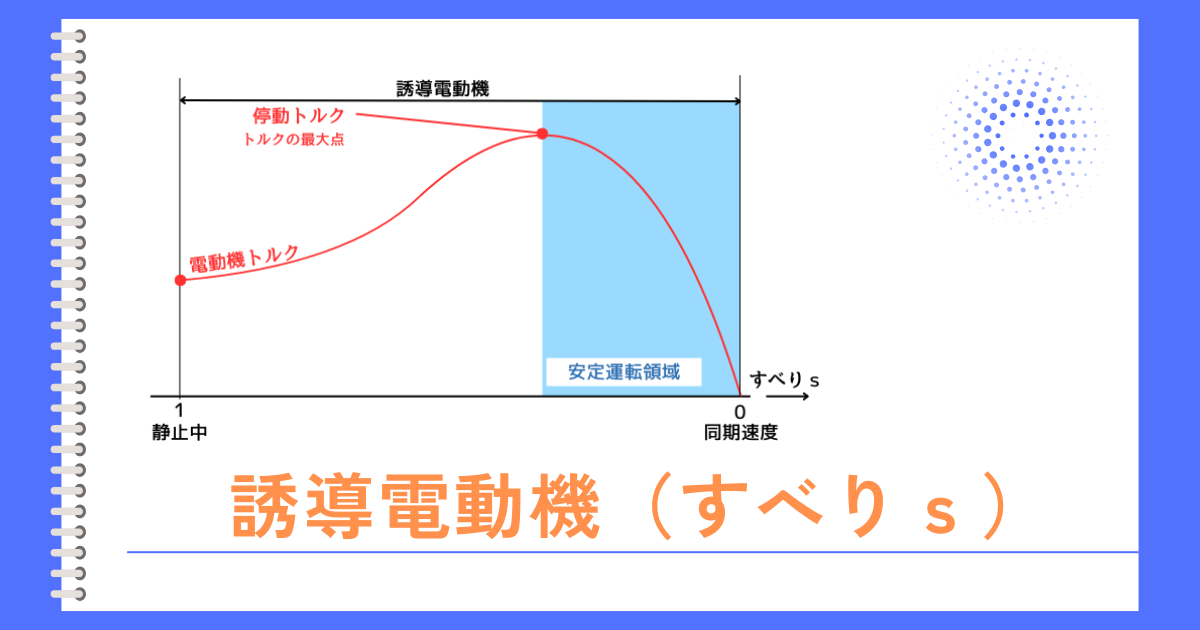
誘導電動機として回転時\(0<s<1\)

誘導電動機に電源入力を行い、静止状態から動き始めて徐々に加速していくと、すべりは1から0に近づいていきます。
すべりの減少していくと、誘導性リアクタンスの影響が小さくなるため、電動機のトルクが徐々に増加していきます。

誘導電動機が出力できるトルクの最大値を停動トルクと呼び、停動トルクを超えると、徐々に電動機トルクが低下していきます。
この徐々に電動機トルクが低下する領域を、安定運転領域と呼びます。
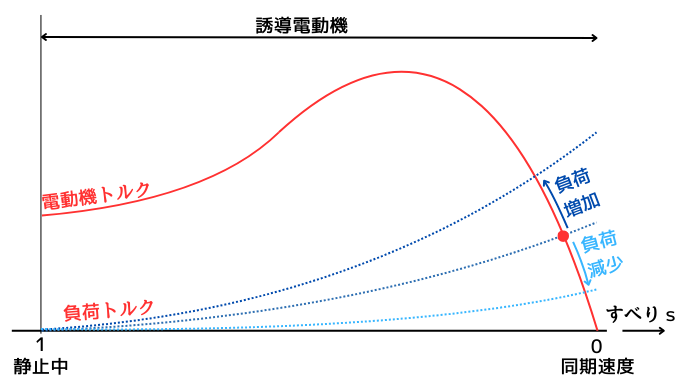
電動機トルクと、負荷トルクが釣り合う点ですべりが安定し、回転速度も安定します。
回転速度が安定した後に、
負荷が増加するとすべりは増加し、
負荷が減少するとすべりは減少します。
安定運転領域内の負荷の増加であれば、すべりが増加して電動機トルクも増加することで、運転し続けることが出来ます。
しかし、停動トルクを超えるような負荷がかかった場合、電動機は停止してしまいます。
すべりが無いとき(\(s=0\))
すべりが無い(\(s=0\))ときは、回転子にトルクが発生しません。
回転子にトルクが発生しないことから、回転速度\(N\)が同期速度\(N_s\)を超えることはできません。
\(s=0\)のときトルクが発生しない理由
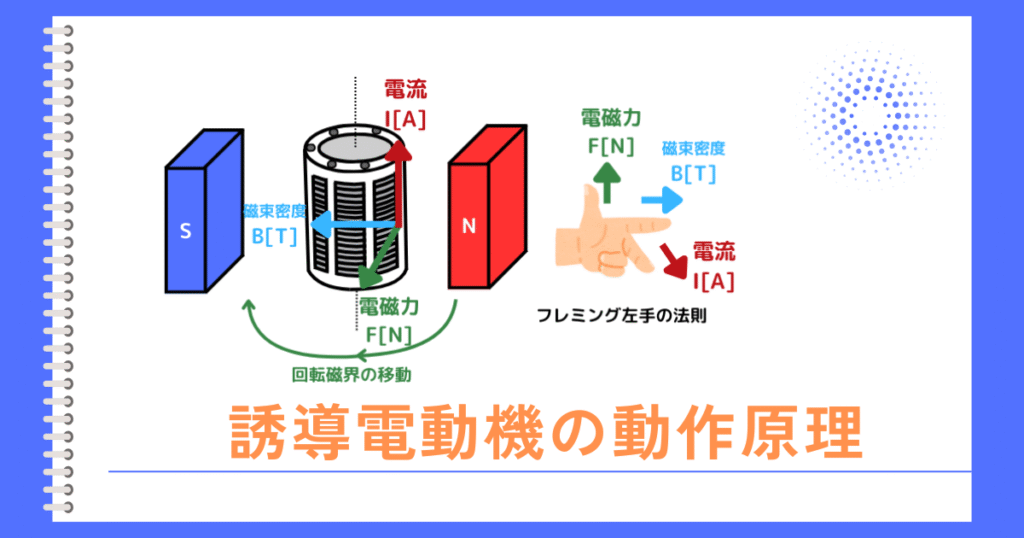
回転子に電磁力が発生する原理は次の通りです。(詳細は誘導電動機の動作原理を参照)
\(s>0\)のとき
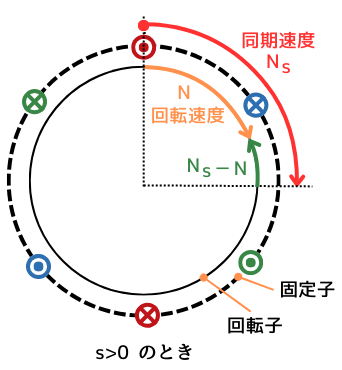
固定子が作る回転磁界の速度(同期速度\(N_s\))に対して、回転子の回転速度\(N\)が遅れることで、この二つの間に相対速度(\(v=N_s-N[m/s]\))が発生します。
相対速度\(v[m/s]\)が得られることで、フレミング右手の法則で示される方向に誘導起電力\(e[V]\)が発生し、渦電流が回転子に流れます。
渦電流が流れることで、フレミング左手の法則で示される方向に電磁力\(F[N]\)が発生します。電磁力は回転子軸を中心としたトルク\(T[N・m]\)になります。
\(s=0\)のとき

\(s=0\)のときは、同期速度 \(N_s\)と、回転速度 \(N\)が同じ速度で回転しています。(\(N=N_s\))
そのため、この二つの間に相対速度\(v\)が発生しません。\(v=0\)
その結果、誘導起電力\(e\) が発生せず、渦電流も流れないため、電磁力が発生せず、トルクが発生しません。
誘導制動機(1<s)
静止状態のすべり\(s=1\)よりも大きな値のときは、回転子の回転方向が回転磁界の回転方向と逆方向になります。
このとき、回転子の回転方向と逆方向に回ろうとするトルクが加わるため、誘導制動機(ブレーキ)として働きます。このときのトルクを、制動トルクと呼びます。
誘導制動機として動作させるには、回転中の誘導電動機の任意の2相の電源端子を入れ替えることで、相回転が逆になるため、簡単に逆相制動させることができます。
しかし、逆相制動をすると、定格電流の5倍以上の大きな電流が流れるため、二次抵抗を大きくする等の対策をする必要があります。
関連記事
参考書
イラストがとても多く、視覚的に理解しやすいので、初学者に、お勧めなテキストです。
問題のページよりも、解説のページ数が圧倒的に多い、初学者に向けの問題集です。
問題集は、解説の質がその価値を決めます。解説には分かりやすいイラストが多く、始めて電気に触れる人でも取り組みやすいことでしょう。

本ブログの管理人は、電験3種過去問マスタを使って電験3種を取りました。
この問題集の解説は、要点が端的にまとまっていて分かりやすいのでお勧めです。
ある程度学んで基礎がある人に向いています。

コメント